SedonaDB 0.4: GPU-Accelerated Spatial Joins¶
In SedonaDB 0.4, we taught this Rust database to run spatial joins on your $1,500 gaming GPU's ray tracing cores, and it beats an H100.
The Apache Sedona community released SedonaDB 0.4.0, resolving 187 issues and adding 26 new functions from 15 contributors. SedonaDB is the first open-source, single-node analytical database that treats spatial data as a first-class citizen — the counterpart to the distributed Sedona engines for small-to-medium datasets running on a single machine.
This is the first in a series of posts diving into what's new in SedonaDB 0.4. We'll be covering more of the release — the Python DataFrame API, the R dplyr interface, Geography support, GeoParquet write support, N-dimensional rasters and Zarr, and more — in the posts to come; for the full rundown, see the 0.4.0 release blog post. We're kicking things off with the feature we're most excited about: GPU-accelerated spatial joins.
GPU-Accelerated Spatial Joins¶
Gaming GPUs contain dedicated ray tracing cores designed for video game lighting — and they sit idle during database queries. Spatial joins are about finding intersecting geometries, which maps naturally onto ray tracing primitives. We built RayBooster, an extension that brings ray tracing core acceleration into SedonaDB.
The accompanying research paper, "RayBooster: A Ray Tracing Engine to Accelerate SedonaDB," was accepted to VLDB 2026 (Industry Track), developed in collaboration with The Ohio State University.
How it works: four components¶
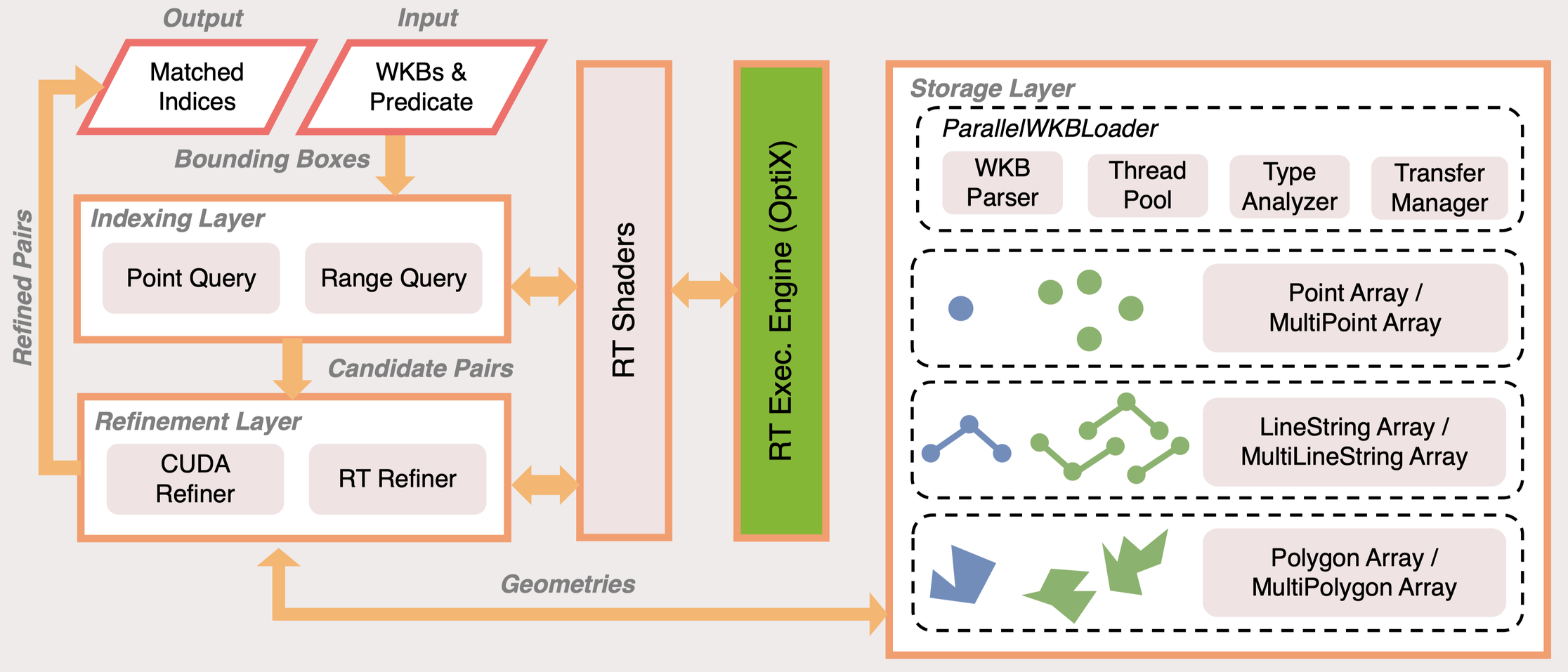
1. GPU-friendly storage layout. Instead of the stream-oriented WKB format, RayBooster uses a Structure of Arrays organization that separates offsets, vertices, and types, enabling O(1) random access to any geometry.
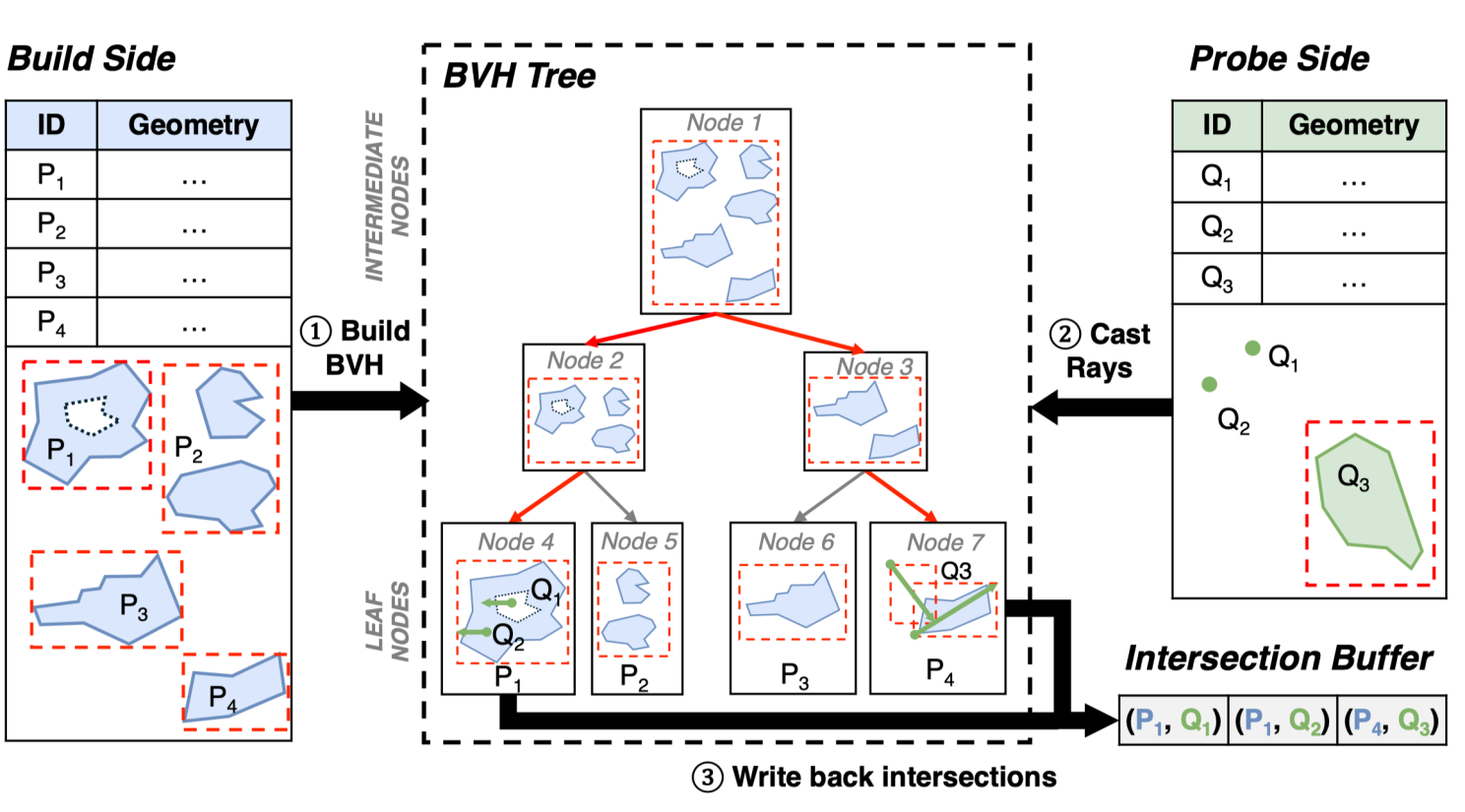
2. A single monolithic index. Rather than building millions of tiny index trees, it uses Z-stacking — encoding each geometry's ID into the unused Z-axis of the ray tracing scene and building one global BVH for the entire batch.
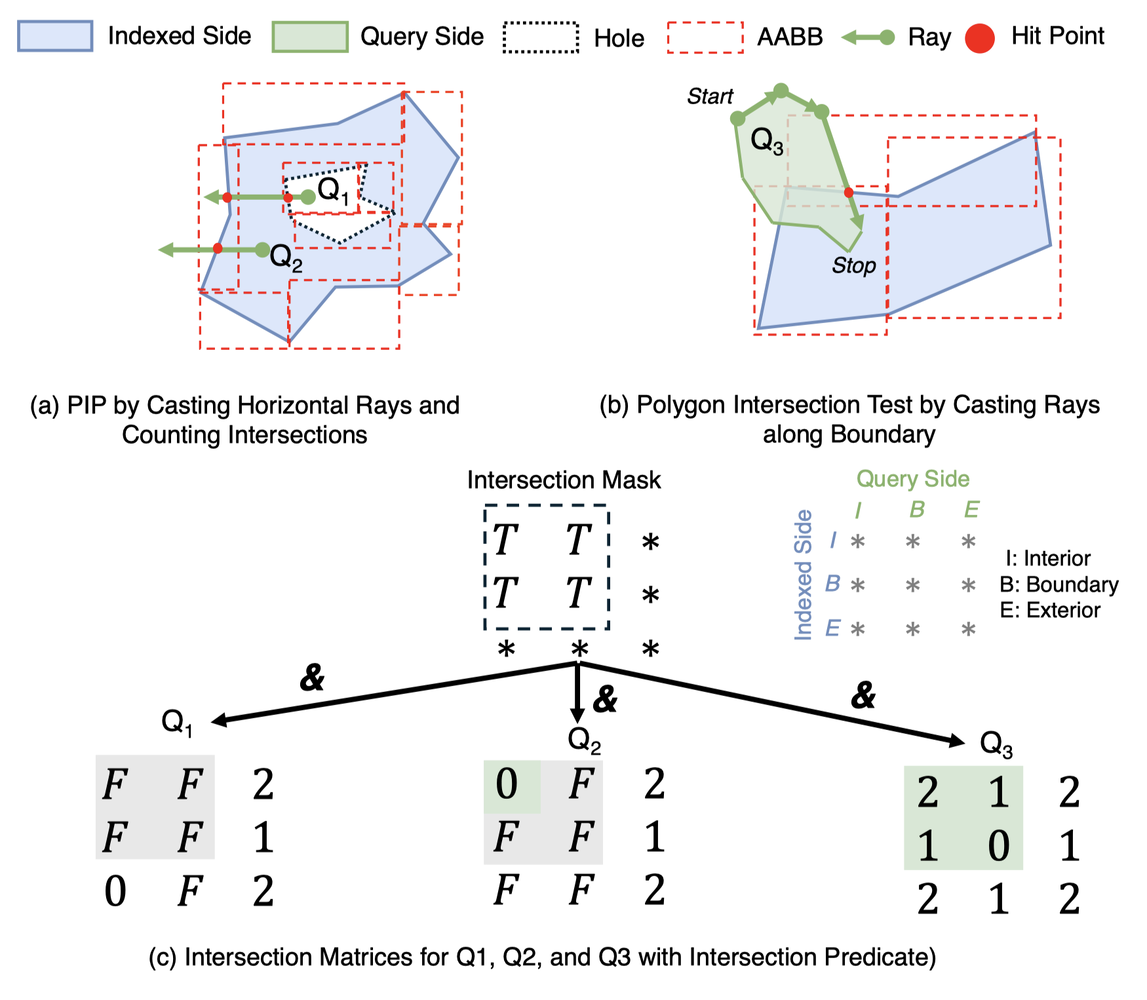
3. A universal predicate engine. RelateEngine computes the DE-9IM matrix (a topological descriptor) on RT cores, giving one code path that resolves any geometry/predicate combination instead of hardcoding 500+ kernel variants.
4. Memory-aware execution. A scheduling and spilling layer keeps joins within GPU memory budgets on irregular real-world workloads, preventing out-of-memory failures.
Performance¶
Testing on SpatialBench:
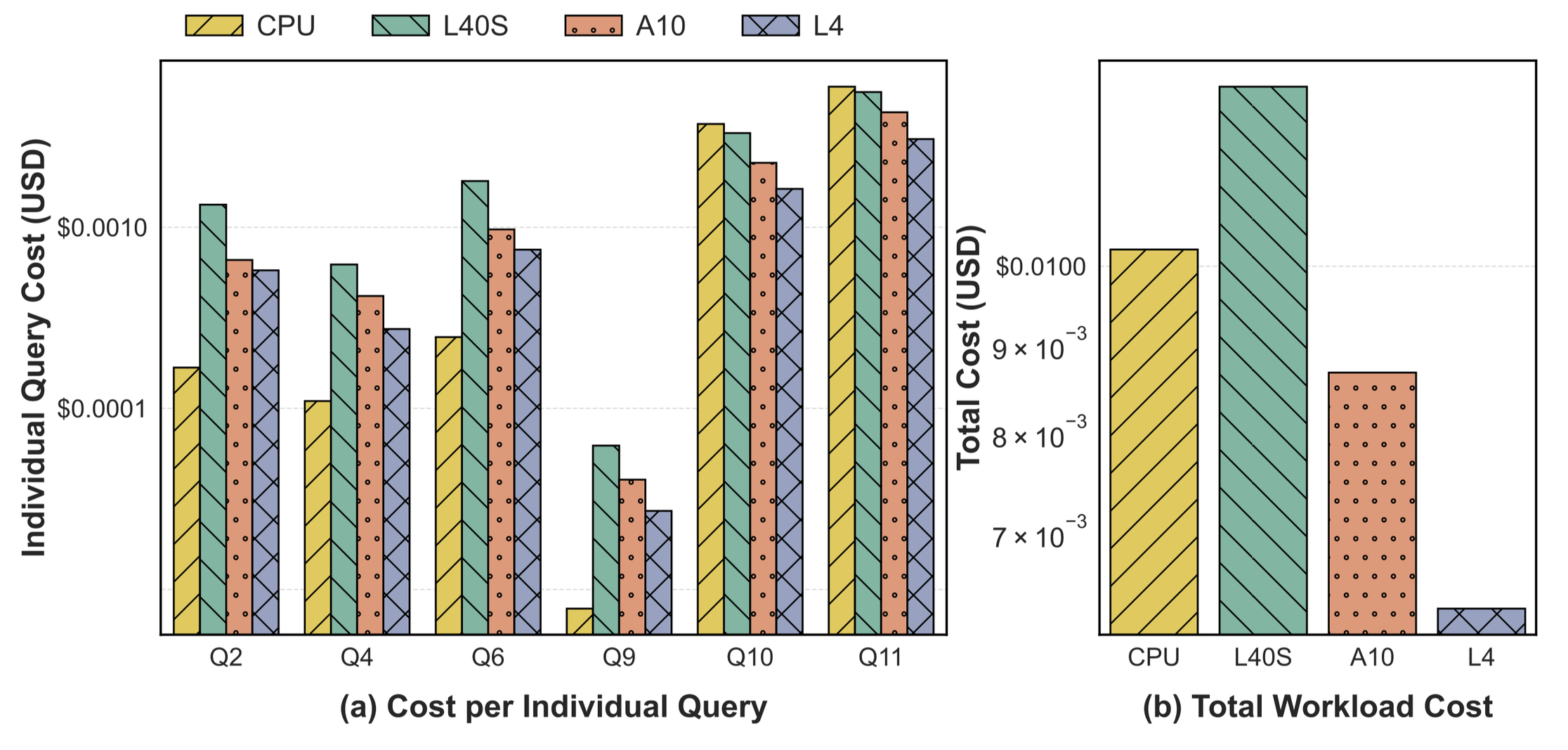
- Up to 5.93x speedup on heavy joins, with a 59.02% cost reduction on AWS
- Q11 cross-zone trip join: 7.51s (CPU) → 1.61s on a consumer RTX 3090 — a 4.66x speedup
- 10x scale: 53.34s reduced to under 7s
- Heavy joins at scale: 4.93x to 9.68x speedups across GPU models
- Consumer RTX 3090 vs. H100: on some queries the gaming card actually beat the H100 (1.26s vs 1.77s on Q10), despite the H100 lacking RT cores
Using it¶
On a machine with an NVIDIA GPU, pull the official Docker image and enable the feature with a single command:
ctx.sql("SET gpu.enable = true")
The GPU Acceleration guide walks through launching the Docker image on NVIDIA GPU machines and lists the supported compute capabilities.
Citation¶
Liang Geng, Rubao Lee, Dewey Dunnington, Feng Zhang, Jia Yu, and Xiaodong Zhang. "RayBooster: A Ray Tracing Engine to Accelerate SedonaDB." PVLDB, 2026 (Industry Track).